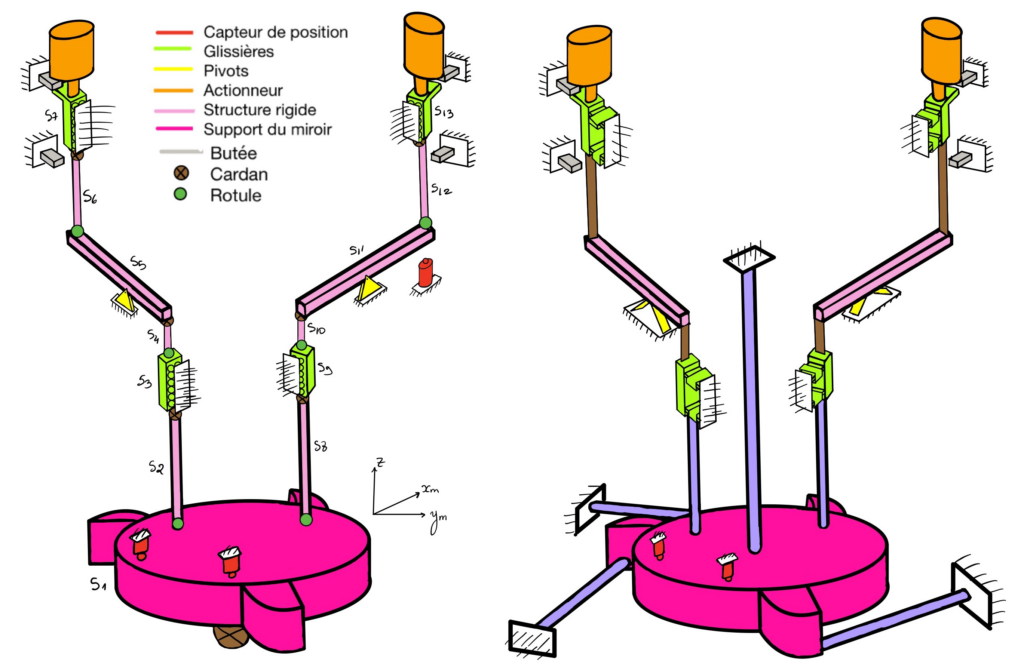
We developed and evaluated a total of five mechanisms before committing to the final solution shown above. This is a merge of three previously studied solutions optimizing the dynamic equilibrium and parasitic motion. I mostly worked on the calculations for the dynamic equilibrium
After choosing the form of the mechanism we had to dimension it to maximize the frequency of oscillation. For this, I wrote a MatLab model of our system connecting all the relevant geometrical parameters to the oscillation frequency. Adding constraints like minimal and maximal dimensions, buckling avoidance , and dymanic equlibrium resulted in a constrained optimization problem.
I expected to to run the program and directly get the optimal solution. However, reality proved me wrong. The two major problems were the non-convexity and the sensitivity to rounding errors due to the different order of magnitude of the parameters. I solved this problem by reducing most of the equations by hand and reducing the number of variables. After many hours and different starting points we finally had a solution that fulfilled all the constraints and was most likely (at least close to) optimal.
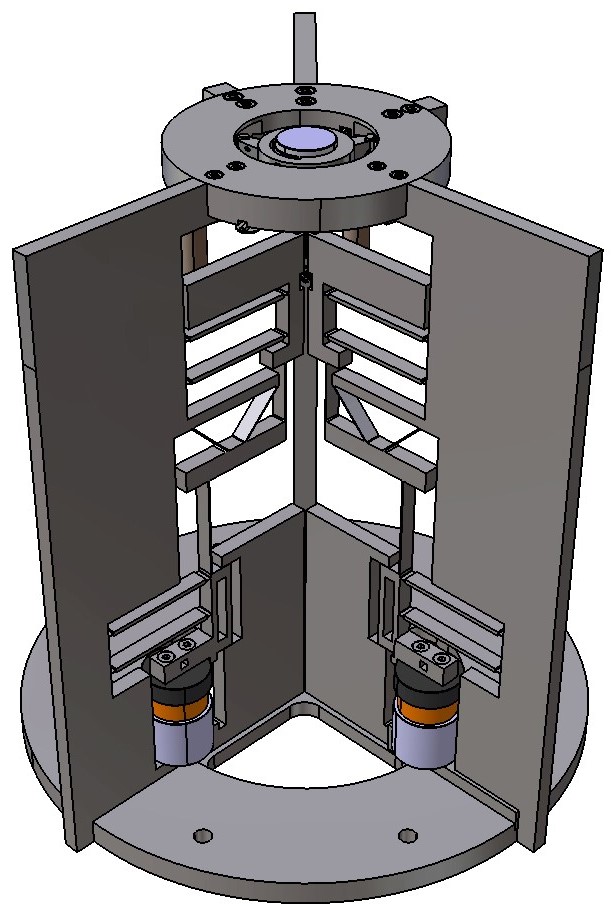
Finally, we implemented the solution of the optimization problem in a 3d model. As wer previously included dimensinal constraints this step created only minor problems that could easily be solved. We then successfully checked the dynamics and parasitic motion in a finite element simulation. The simulation slightly differed from our theoretical calculations but still fulfilled all the requirements.
We 3D printed our model with some minor adjustments to consider the different mechanical properties of polymers and metal to ensure the mechanical integrity and feasibility of our design. Manufacturing the mechanism with its original materials was sadly not possible due to the associated costs.